A 2D Pathfinder written in C++ using the stb_image library for image rendering. The pathfinder utlizes the A* algorithm to find the optimal path between any 2 nodes on the grid.
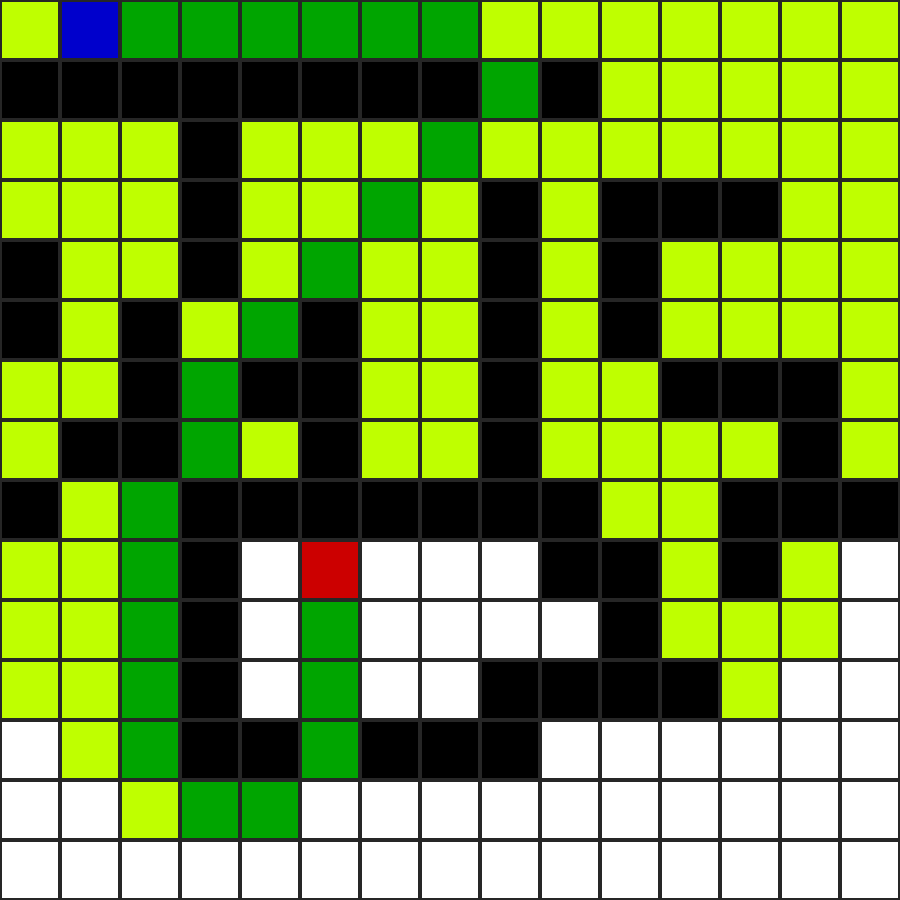
The pathfinder needs to be given a map, starting and target point. Based on this data and pathfinder configurations, it will output a map along with the solution.


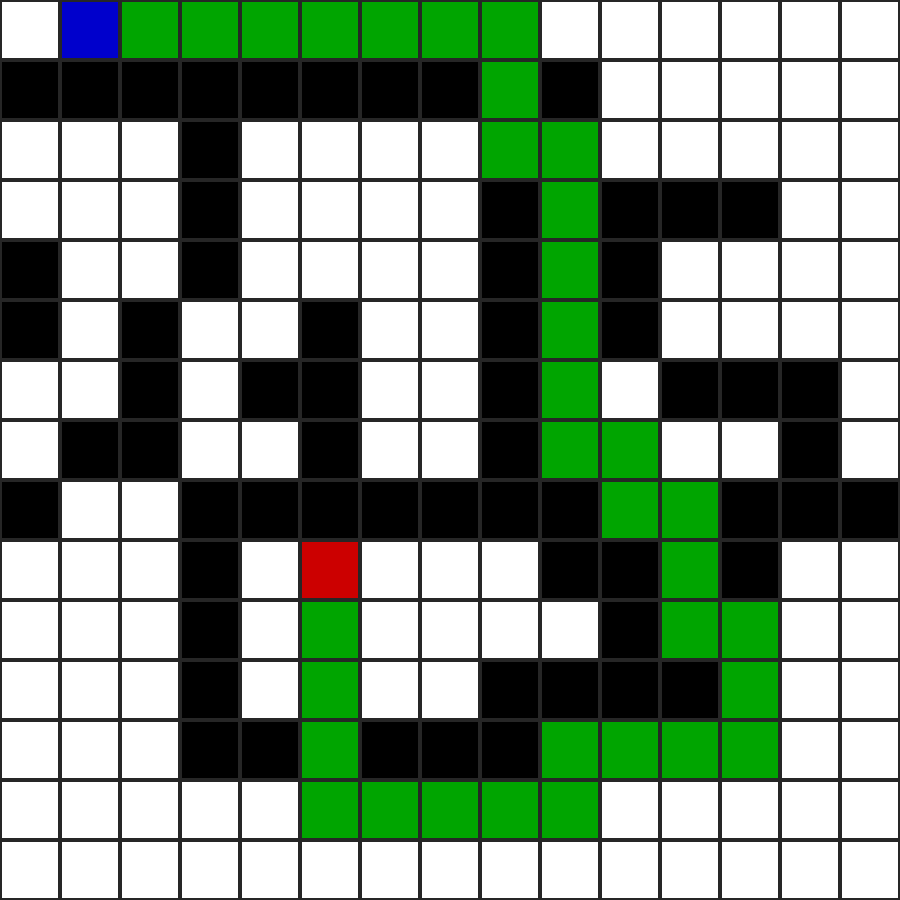
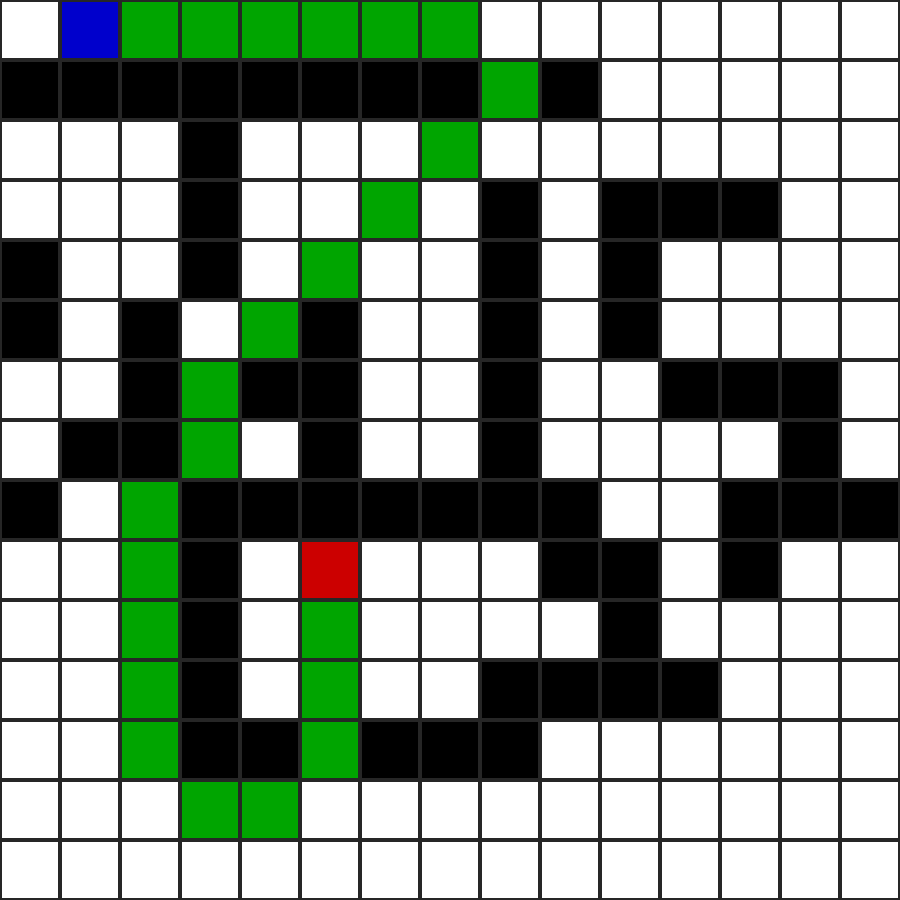
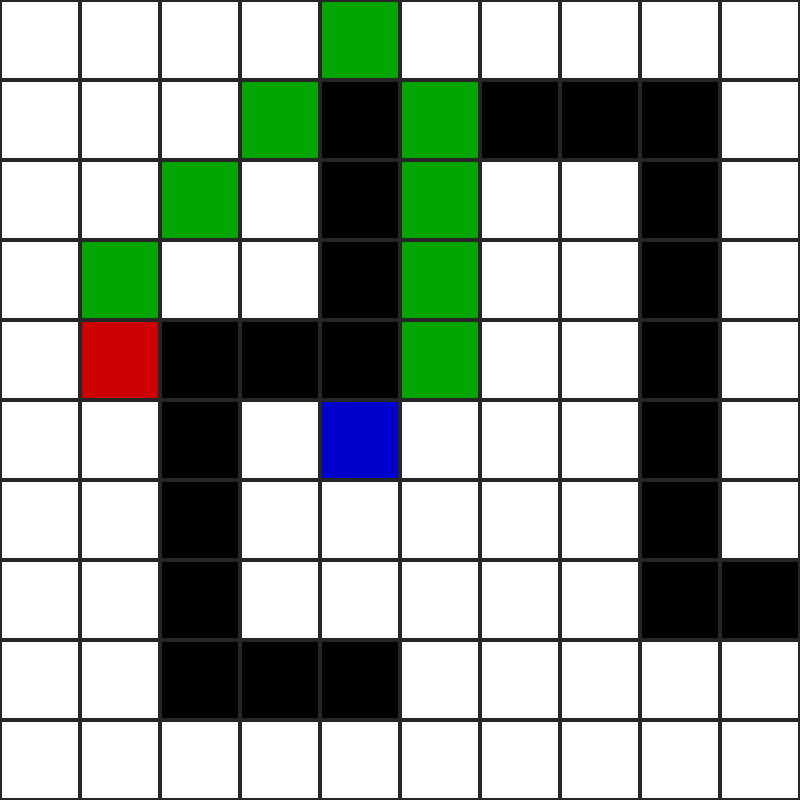
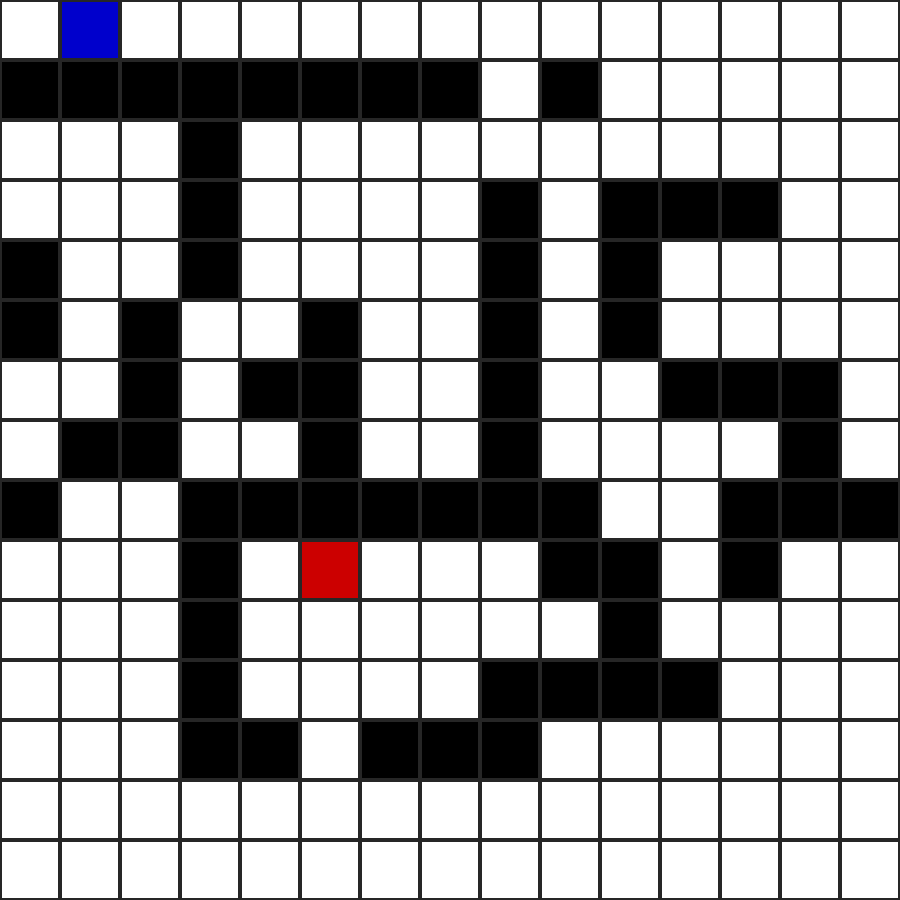
If we change the target node, a new optimal path will be calculated and shown in the output image.

Specifications of the pathfinder:-
// main.cpp
int gridState[NUMBER_ROWS * NUMBER_COLUMNS] = {0, 2, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 0, 1, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 0,
1, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 0, 0, 0, 0,
1, 0, 1, 0, 0, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0,
0, 0, 1, 0, 1, 1, 0, 0, 1, 0, 0, 1, 1, 1, 0,
0, 1, 1, 0, 0, 1, 0, 0, 1, 0, 0, 0, 0, 1, 0,
1, 0, 0, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1,
0, 0, 0, 1, 0, 3, 0, 0, 0, 1, 1, 0, 1, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0,
0, 0, 0, 1, 1, 0, 1, 1, 1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0};
// grid.h
struct GridNode
{
Position pos; // Position of node
NODE_STATE state; // State of Grid Node
std::vector<GridNode *> neighbours; // List of Neighbour Nodes
int neighbourCount; // Neighbour Count
GridNode *parent; // The node which comes before this node
int gCost; // Distance from start Node
int hCost; // Distance from target Node
int index; // Index in the heap
...
// Checks if Node is Traversable or not
bool is_traversable()
{
return (state != BLOCKED);
}
// Returns the sum of gCost and hCost for the node
int get_fcost()
{
return gCost + hCost;
}
// Compare Node with Item i.e. (Item - Node)
int compare_item(GridNode *item)
{
int deltaF = (item->get_fcost() - get_fcost());
return ((deltaF == 0) ? (item->hCost - hCost) : deltaF);
}
};
// path.h
Path find_path(Grid *grid)
{
... // Setup open and closed list
while (openList.count > 0)
{
// Find Current Node
GridNode *currentNode = openList.remove_first();
closedList.add_to_heap(currentNode);
if (currentNode == targetNode)
{
break;
}
// Check Neighbours
for (int i = 0; i < currentNode->neighbourCount; i++)
{
GridNode *neighbour = currentNode->neighbours[i];
if (neighbour->is_traversable() && !closedList.has_node(neighbour))
{
int moveCost = currentNode->gCost + get_distance_bw_nodes(currentNode, neighbour);
if (!openList.has_node(neighbour) || moveCost < neighbour->gCost)
{
neighbour->gCost = moveCost;
neighbour->hCost = get_distance_bw_nodes(targetNode, neighbour);
neighbour->parent = currentNode;
if (!openList.has_node(neighbour))
{
neighbour->state = (neighbour != targetNode) ? NEIGHBOUR : neighbour->state;
openList.add_to_heap(neighbour);
}
else
{
openList.update_item(neighbour);
}
}
}
}
if (currentNode != startNode)
{
currentNode->state = CHECKED;
}
}
std::cout << "Path Found!!!" << std::endl;
// Setup Path
Path p;
... // Retrace path and store all nodes
return p;
}